いよいよ自動運転ミニカーの各パーツを紹介していきます。
今回は超音波センサーについて解説していきます。
超音波センサーの原理
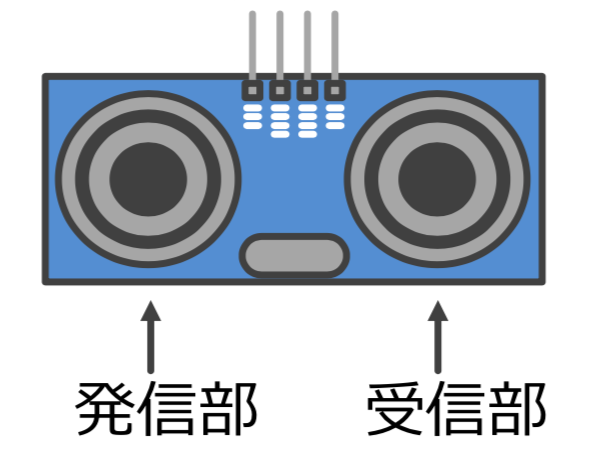
超音波センサーの構成
超音波センサーは2つのセンサー(発信部と受信部)と4つの入出力端子で構成させています。
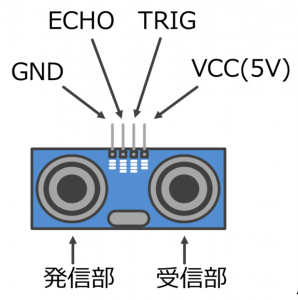
- TRIG・・・ラズパイからの出力
- ECHO・・・ラズパイへの入力
- VCC・・・電源(入力5V)
- GND・・・電源(アース)
超音波センサーの原理
次に超音波センサーの原理について解説します。
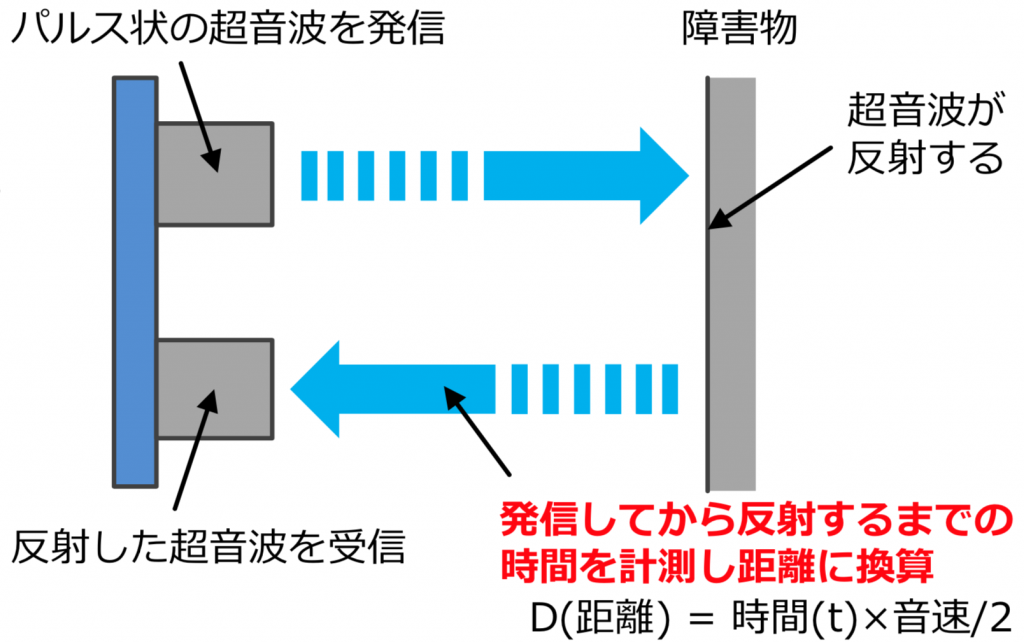
超音波センサーでミニカー周辺の障害物を検知することで、障害物を回避することができます。発信部からパルス状の超音波を発信し、受信部で障害物から反射した超音波を受診します。その際の超音波を発信してから反射するまでの時間を計測し、距離に換算しています。
計算式:D(距離)=時間(t)×音速/2
ラズパイへの接続方法
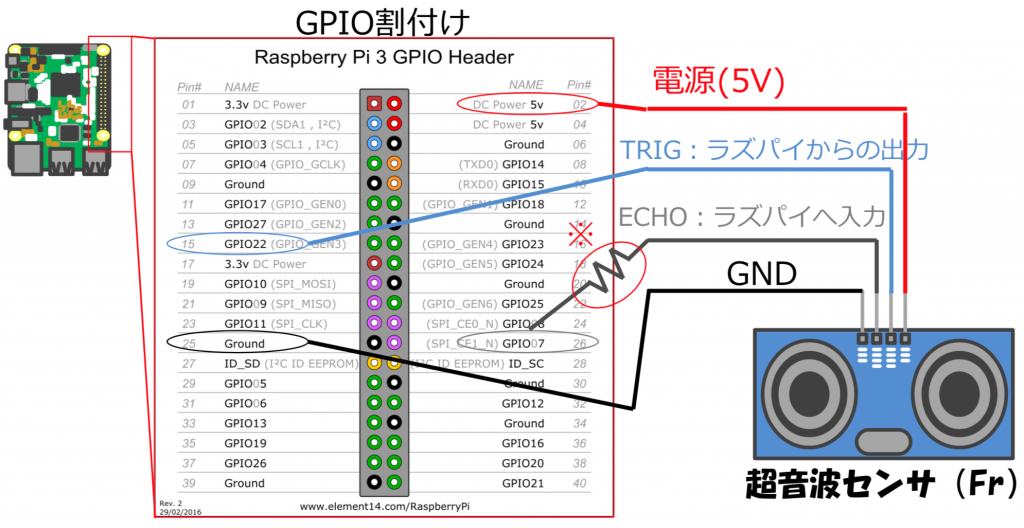
ラズパイとの接続は下図のように行います。
ラズパイは3.3Vで駆動しているおり、過電圧による破損防止のためECHO(ラズパイへの入力)に抵抗を設けて降圧しています。


コメント