今回はモータの制御方法について解説していきます。
自動運転ミニカーでは、駆動用のDCモータと操舵用のサーボモータを使用しています。どちらもPWMと呼ばれる信号をラズパイから送ることで制御を行っています。
PWM制御
PWM制御とは
PWM(Pulse Width Modulation)とは日本語で「パルス幅変調」といい、PWM制御はオンとオフを繰り返しきりかえることで出力される電力を制御するものです。
パルス幅と周期とは
次にPWM制御を理解する上で大事な用語である「パルス幅」と「周期」について解説します。
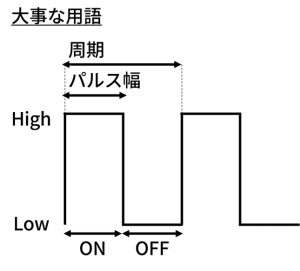
パルス幅
パルスとは短時間に立ち上がる変化をする信号のことを言います。PWMでは図のように山と谷のある波形となり、その電圧がもっとも高くなる山の幅をパルス幅といい、その単位[s(秒)]は時間となります。
周期
図で示す山と山、つまりパルス同士の間隔を周期といいます。 また周期の逆数をとったものを周波数と呼び、単位を[Hz]もしくは[1/s]で表します。
モータの制御方法
モータ制御全体をまとめると下図のようになります。それぞれ解説していきます。
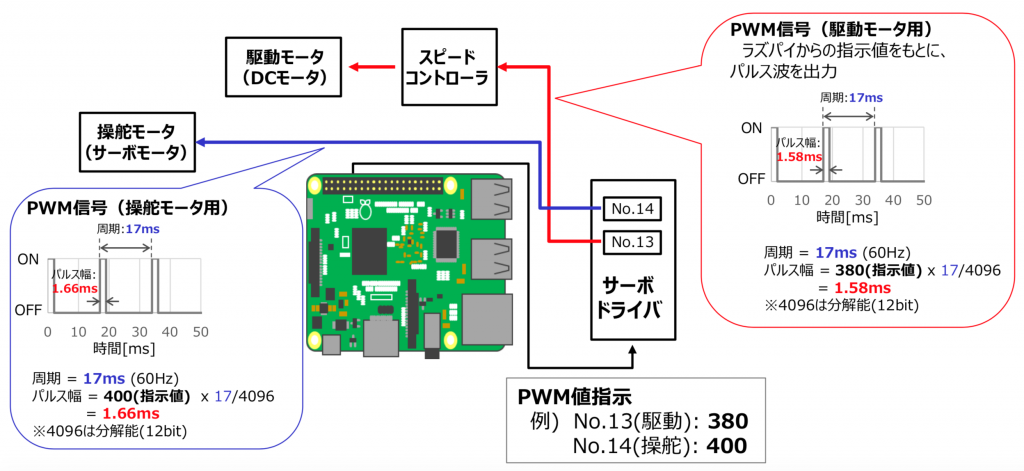
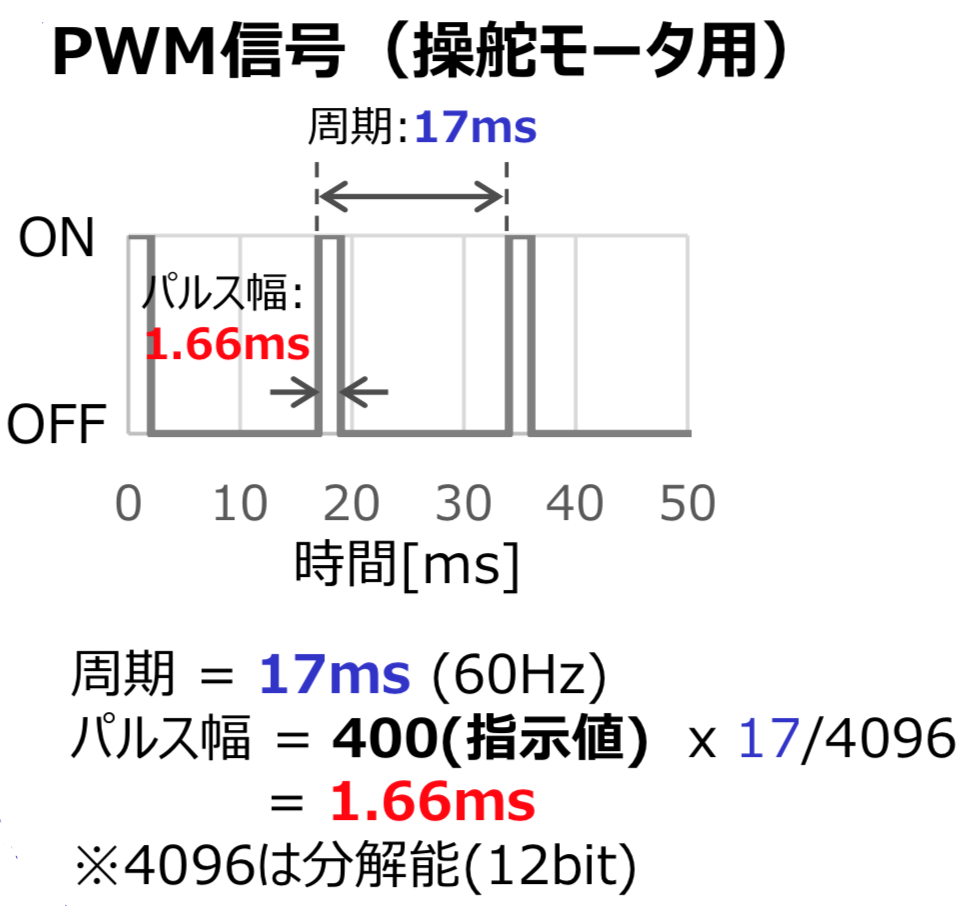
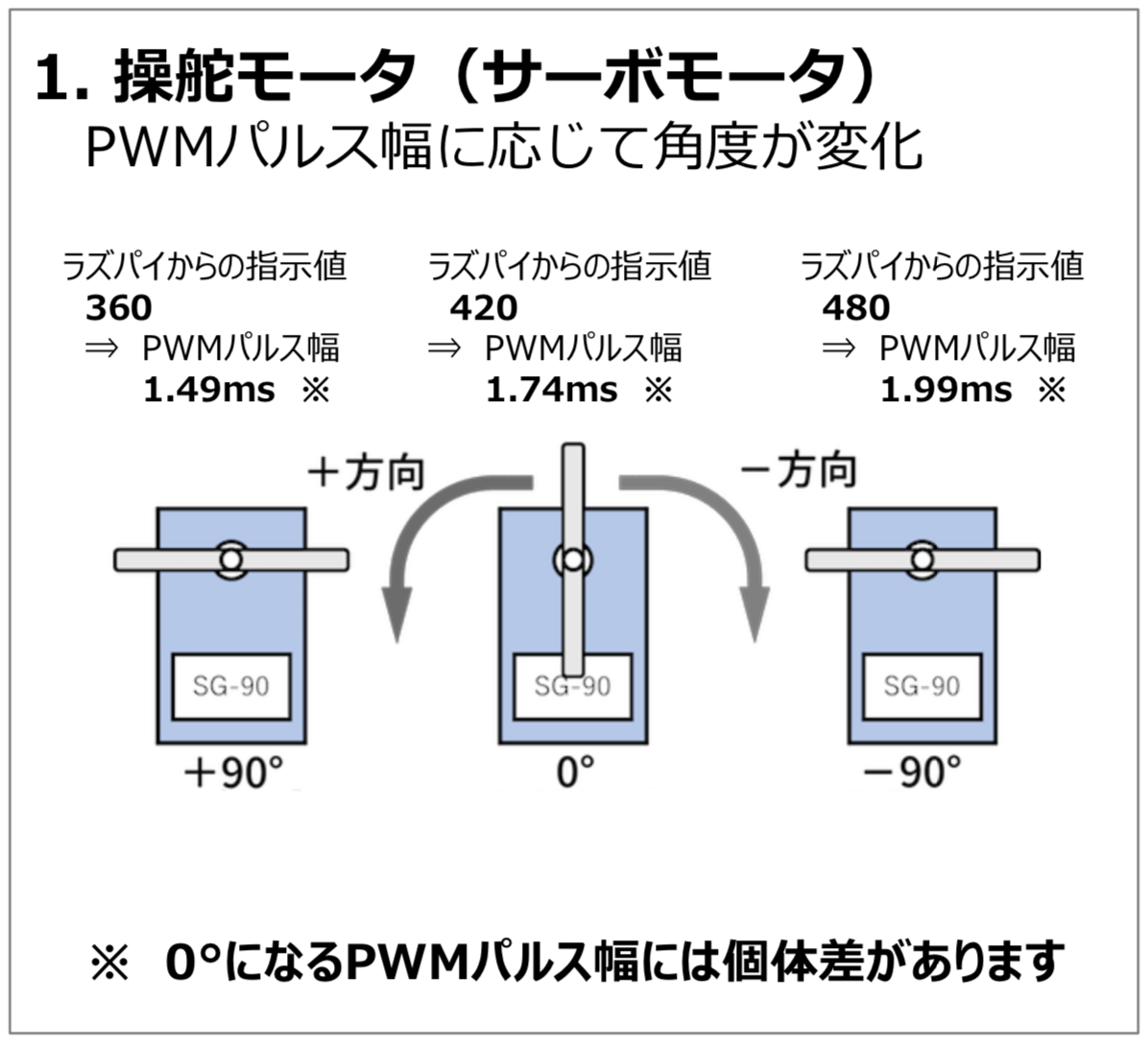
操舵モータ(サーボモータ)
PWM値として、400という指示値を入れた場合、パルス幅は下図のように1.66msとなります。このパルス幅に応じて操舵モータの角度を変更することができます。
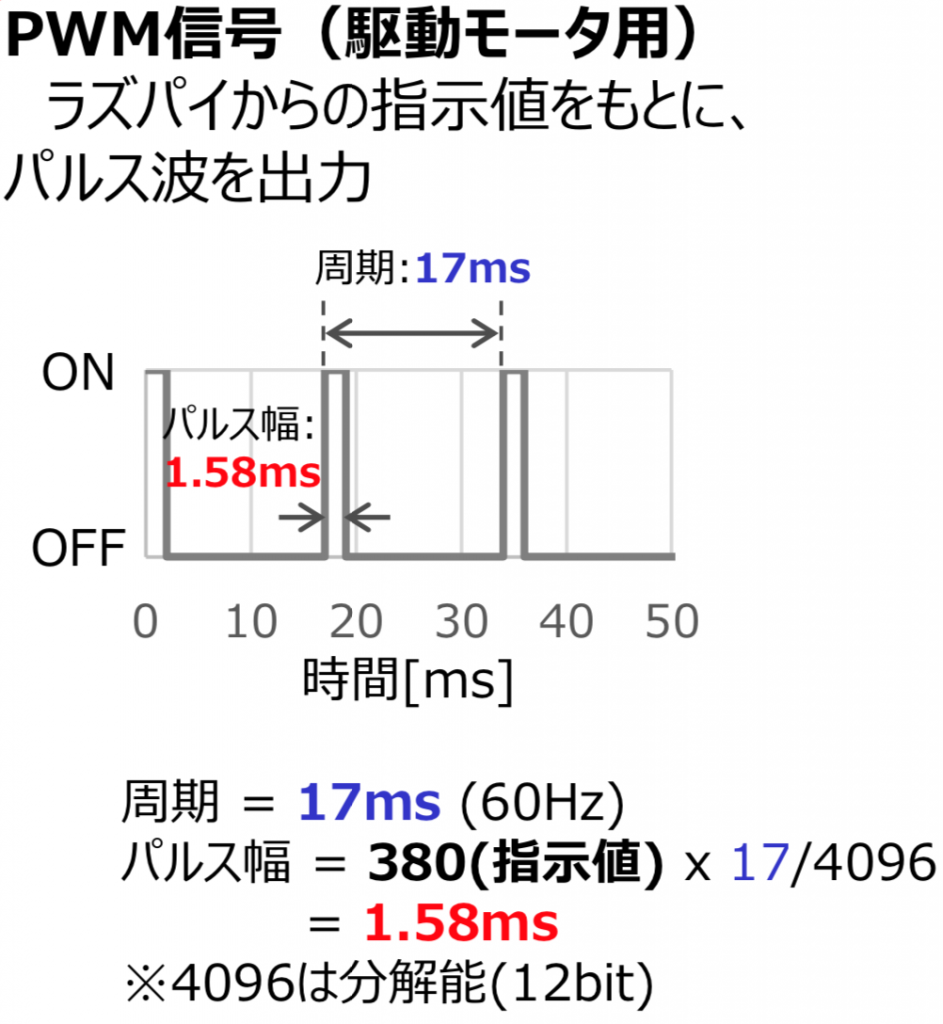
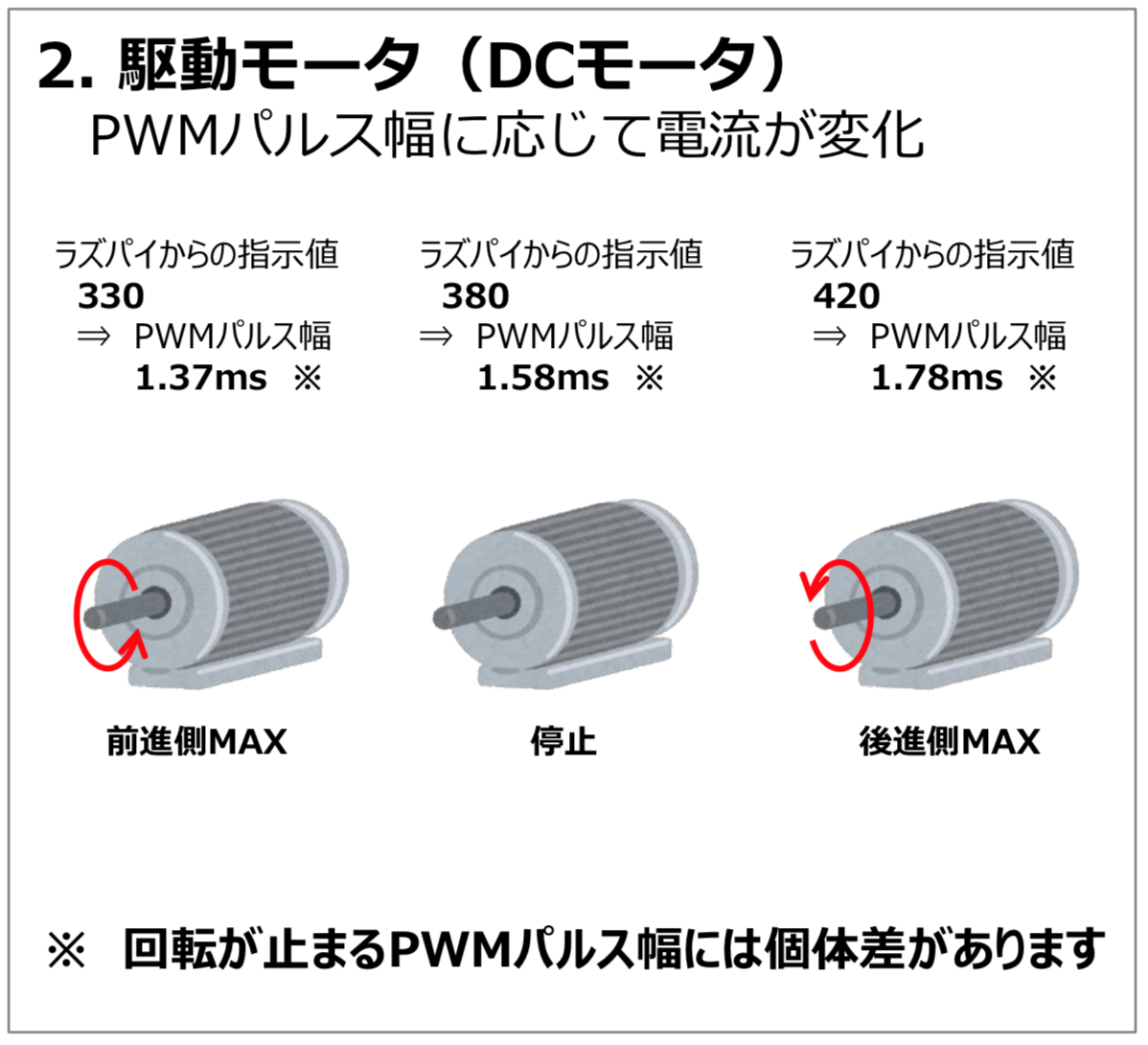
駆動モータ(DCモータ)
サーボモータと同様に、PWM値として、380という指示値を入れた場合、パルス幅は下図のように1.58msとなります。このパルス幅に応じて電流が変化し、駆動モータ回転数及び方向を切り替えることができます。

コメント